Dataset Source
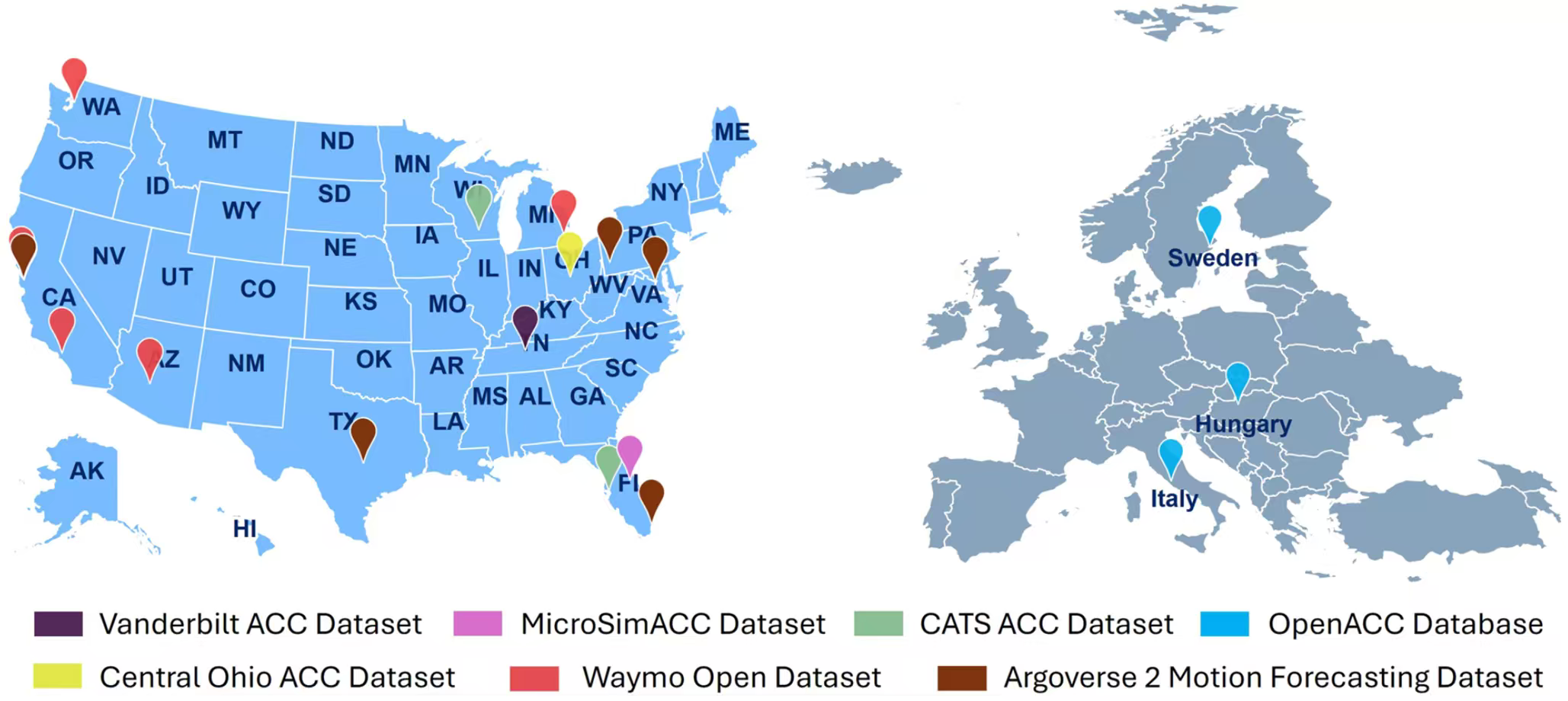
The challenge dataset is derived from the Open-PAV dataset, maintained by the IEEE ITSS Emerging Transportation Technology Testing (ET3). Open-PAV integrates 14 open-source AV trajectory datasets and provides more than 50 hours of longitudinal trajectories at 10 Hz.
The source datasets cover multiple test sites in the United States and Europe. Additional details on the source data and processing methodology are available in A unified longitudinal trajectory dataset for automated vehicle.
The final challenge dataset is available here: Download the challenge dataset.
Trajectory Definition
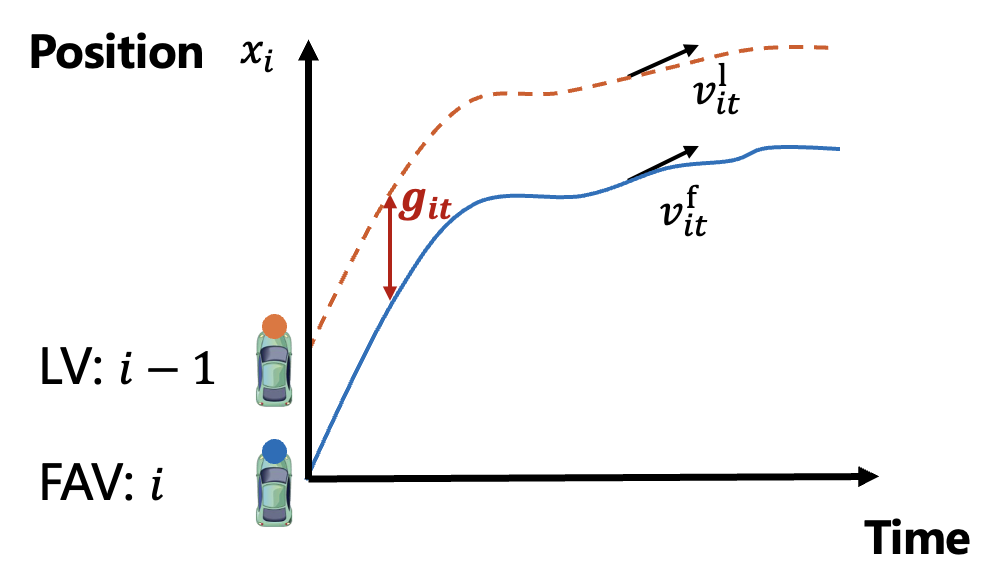
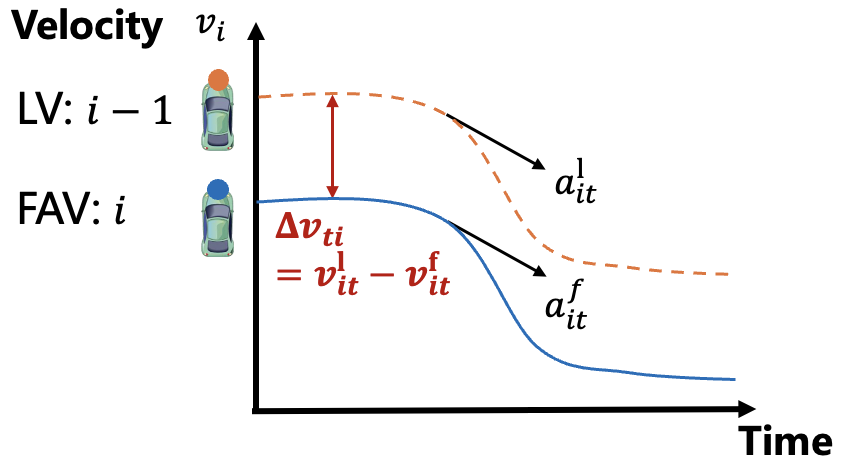
In this challenge, one trajectory segment corresponds to a longitudinal car-following sequence for one following automated vehicle (FAV) and one lead vehicle (LV) in the same lane. The main variable relationships are illustrated in Figure 2.
- Trajectory-segment index set:
- Time index set for segment : , sampled at
- FAV state at time : , representing longitudinal position, speed, and acceleration
- LV state at time :
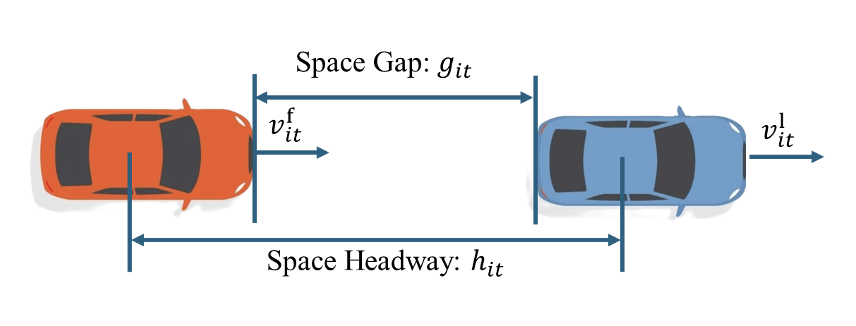
- Spatial headway: (center-to-center distance)
- Spatial gap: (bumper-to-bumper distance)
- Relative speed:
All trajectories are segmented into fixed 30-second intervals.
Variable Definitions
| Notation | Label | Description | Formulation | Unit |
|---|---|---|---|---|
Trajectory_ID | Trajectory-segment identifier | N/A | ||
Time_Index | Time index within trajectory segment | s | ||
| - | ID_LV | Lead vehicle ID | Identifier of the LV paired with the FAV in segment | N/A |
| - | Type_LV | Lead vehicle type | 1 for automated vehicle, 0 for human-driven vehicle | N/A |
Pos_LV | Longitudinal position of the LV | m | ||
Speed_LV | Speed of the LV | m/s | ||
Acc_LV | Acceleration of the LV | m/s | ||
| - | ID_FAV | Following automated vehicle ID | Identifier of the FAV in segment | N/A |
Pos_FAV | Longitudinal position of the FAV | m | ||
Speed_FAV | Speed of the FAV | m/s | ||
Acc_FAV | Acceleration of the FAV | m/s | ||
Spatial_Gap | Bumper-to-bumper distance between LV and FAV | m | ||
Spatial_Headway | Center-to-center distance between LV and FAV | m | ||
Speed_Diff | Relative speed (LV minus FAV) | m/s | ||
| - | Length of the LV | - | m | |
| - | Length of the FAV | - | m |